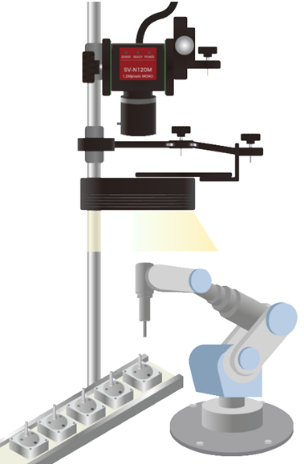
ロボット ネジ締め位置補正
ロボットで、ネジ締めを⾏う際の、製品(ネジ⽳)のズレを補正します!

| 内 容 |
ロボットを使⽤してねじを締めたい。 |
| |
| 課 題 |
製品(ネジ⽳)のズレがあり、ネジを絞められない不具合が発⽣。
停止位置精度向上のために、押さえ機構などを追加したり、
治具搬送は行いたくない。
また、多品種生産によるネジ穴の位置違いにも同じ装置で対応したい。 |
|

|
ロボットによるネジ締めができない
|

そこで・・・


 画像センサSVシリーズでチェック! 画像センサSVシリーズでチェック! |
| |
ネジ穴の位置(座標)を検出する。 |
| |
正常の位置からのズレ量を補正量としてロボットに出力する。 |


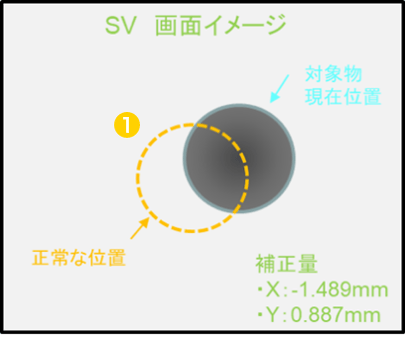
SV画面イメージ
 |
現在のネジ穴の位置を検出し、正常の位置との
ズレ量を検出します。 |
|

|
ズレ量を補正量としてロボットに出力します。 |
 |
ネジ穴の加工位置にバラツキがあっても、ロボットを使ってネジ締めを行うことができます。
|
使用機種|SV-N500M
| 省スペース |
一体型なので、空きスペースに設置するだけで、直ぐに使用可能。 |
| |
|
| 位置補正 |
OK/NG判定だけでなく、数値出力が可能!ズレ量を出力して、補正を行うことができます。 |
| |
|
| 上位通信 |
Ethernet/IP通信(アダプタ)対応!上位機器とも簡単に通信が⾏えます。 |

