ロボット 電⼦部品ピックアップ
ロボットで、電⼦部品をピックアップする際のX-Y-θの位置を画像センサで検出!

| 内 容 |
コンベアで運ばれてくる電⼦部品を、ロボットを⽤いてピックアップし、パレットに電⼦部品を挿⼊する。 |
| |
| 課 題 |
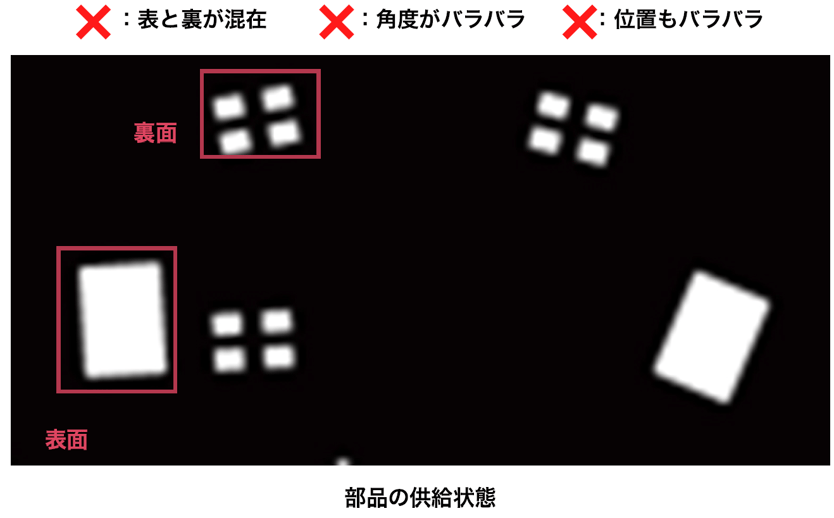
部品はコンベアで位置・⽅向・表裏がバラバラに供給されるため、そのままではロボットで部品をつかめない。 |
そこで・・・


 画像センサSVシリーズでチェック! 画像センサSVシリーズでチェック! |
| |
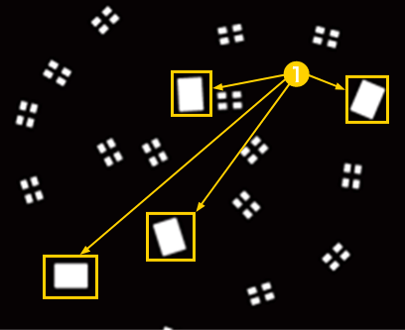
面積や形状などの特徴から表向きの部品を検出する。
|
| |
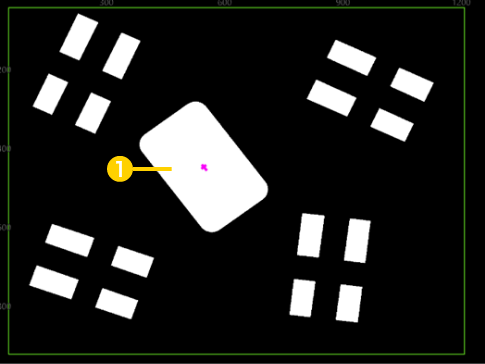
検出した部品の重心の座標(XY)や、角度(θ)を出力する。 |
| |
検出した位置と角度を使って位置を補正する。
|

SV画面イメージ

 |
表⾯の部品検出 → ロボットでピックアップ |
|

|
表⾯の部品が検出されなくなるまでサーチを繰り返す
|
 |
部品を吸着する際に位置がずれても、安定して部品をパレットに挿入することができます。
|
使用機種|SV-N500M
| 省スペース |
一体型なので、空きスペースに設置するだけで、直ぐに使用可能。 |
| |
|
| 位置補正 |
OK/NG判定だけでなく、数値出力が可能!ズレ量を出力して、補正を行うことができます。 |
| |
|
| 上位通信 |
Ethernet/IP通信(アダプタ)対応!上位機器とも簡単に通信が⾏えます。 |

