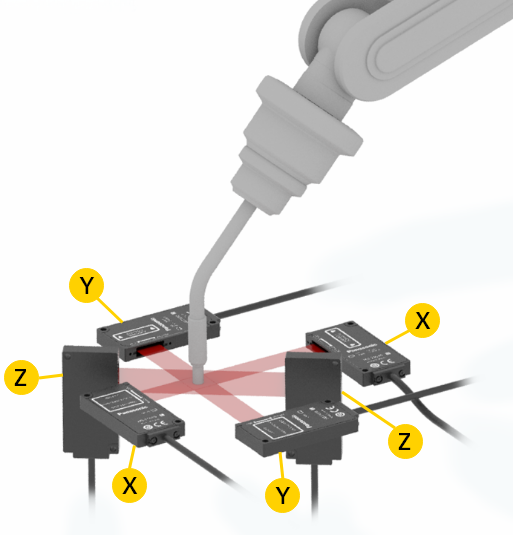
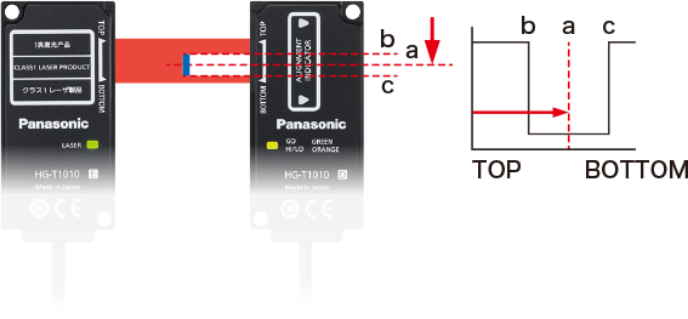
FAアプリケーショントップに戻る 変位センサ 測定 ロボット ロボットハンド先端部分の位置決め ロボットハンド先端部分のXYZ方向をデジタル変位センサHG-Tで位置決め! 2023/12/26 内 容 ロボットの始動時や段取り替え時にロボットハンド先端の位置決めをしたい 課 題 ・手作業による位置決めは、多くの工数がかかる・汎用センサによる位置決めでは、狙いの精度がでない。 そこで・・・ 透過型デジタル変位センサ HG-Tシリーズで測定! 3台のHG-Tをロボットハンドを囲むように設置(XYZ方向を測定) XY軸方向は中心位置検出モードでロボットアームの先端部分の中心を検出 Z軸方向はエッジ検出モードでロボットアーム先端部分のエッジを検出 中心位置検出モード 設置距離100mmで、繰り返し精度2.5μmの高精度測定が可能! 表示画面イメージ 使用機種|HG-T 省スペース 分解能2.5μm(設置距離100mm 時)で微小物の検出が可能! 高精度測定 業界No.1※の高精度測定 ※2023年9月現在、当社調べ 予兆保全 セルフモニタリング機能搭載で、計画的なセンサ交換が可能!